If data is now displayed on the serial monitor, you're good to go!
double Kp = 21; //Set this first analogWrite(rightMotorPWMPin, 255 + rightMotorSpeed); fifoCount -= packetSize; mpu.dmpGetQuaternion(&q, fifoBuffer); //get value for q I hope this helps you bro. C:\Users\MALHAR~1\AppData\Local\Temp\ccPqjIcb.ltrans0.ltrans.o: In function `loop': C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:146: undefined reference to `MPU6050::getIntStatus()', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:149: undefined reference to `MPU6050::getFIFOCount()', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:155: undefined reference to `MPU6050::resetFIFO()', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:163: undefined reference to `MPU6050::getFIFOCount()', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:166: undefined reference to `MPU6050::getFIFOBytes(unsigned char*, unsigned char)'. 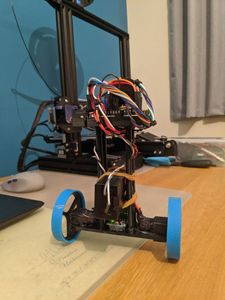 Error compiling for board Arduino/Genuino Uno. The DC motors are connected to PWM pins D6,D9 D10 and D11 respectively. analogWrite(6,LOW); Ki should be large enough so that the angle of inclination does not increase. So make sure your wheels have good grip over the floor you are using. This is due to the horizontal component of acceleration interfering with the acceleration values of y and z-axes.
Error compiling for board Arduino/Genuino Uno. The DC motors are connected to PWM pins D6,D9 D10 and D11 respectively. analogWrite(6,LOW); Ki should be large enough so that the angle of inclination does not increase. So make sure your wheels have good grip over the floor you are using. This is due to the horizontal component of acceleration interfering with the acceleration values of y and z-axes.
uint8_t fifoBuffer[64]; // FIFO storage buffer, // orientation/motion vars
It will simply fall over. However, your photos show two batteries, and the hookup diagram shows them wired in series, which would be 14.8 VDC. Set Ki and Kd to zero and gradually increase Kp so that the robot starts to oscillate about the zero position. Thank You for your reply.Just yesterday I tried to change state of "if (leftMotorSpeed> = 0) { analogWrite (leftMotorPWMPin, leftMotorSpeed); digitalWrite (leftMotorDirPin, LOW);" in HIGHT and I took the next one to LOW, and it finally stopped spinning around z and started going back and forth.I tried to reset "#define targetAngle -0.0" and it seems to be even better (I didn't understand what it was for).Now I'll have to set up PID carefully to eliminate an annoying snap when beating forward. We also have to initialise the Digital PWM pins that we are using to connect our motors to. Increase Ki so that the response of the robot is faster when it is out of balance. Serial.print(devStatus); mpu.setXGyroOffset(40); PID stands for Proportional, Integral, and Derivative. else I see that the battery is connected to both the Arduino UNO and the motor driver. 1 year ago. So lets face it, in this tutorial I will document my experience in building the self balancing robot. We have two measurements of the angle from two different sources. mpu.setZGyroOffset(-85); For PID, I used the PID_V1 library by Brett Beauregard. They include the in-built I2C library, PID Library and MPU6050 Library that we just downloaded. The whole set-up is powered by the 7.4V li-ion battery. mpu.initialize(); // verify connection I copy this progam in Tinkercad software to check how it works but unfortuntely the first error comes up. You can also check our dedicated article on using MPU6050 with Arduino. The response of the filter can be tweaked by picking the correct time constant. This was arrived at after some trials. It is powered by a 5V source.
} // if programming failed, don't try to do anything You should be add library MPU6050, you can look for it in google or include library in arduino IDE. I have a question about offset.How did you decide on the values below in your setup routine?mpu.setYAccelOffset (1593);mpu.setZAccelOffset (963);mpu.setXGyroOffset (40);I have a question from Japan.I'm sorry I'm not good at English. The robot does not use an encoder and the program does not require motor speed value in rpm. The fact that you have been working on this project for almost one month is a testament to your effort. However, I chose to have separate power sources for the motor and the circuit for isolation. } Notice the Fritzing diagram above, connect the MPU6050 to the Arduino first and test the connection using the codes in this IMU interfacing tutorial. mpu.initialize();
The overshoots should also be reduced by now. IP22 rated medical & home-healthcare 18/24/36W AC-DC adaptors with interchangeable AC plugs. But worry not, thanks to the Arduino community we have readily available libraries that can perform the PID calculation and also get the value of yaw from the MPU6050. #define rightMotorDirPin 4, #define TRIGGER_PIN 9 else
// (if it's going to break, usually the code will be 1) #define rightMotorPWMPin 5 mpuIntStatus = mpu.getIntStatus(); // set our DMP Ready flag so the main loop() function knows it's okay to use it mpu.setYAccelOffset(1593); analogWrite(9,output*-1); Repeat the above steps by fine tuning each parameter to achieve the best result. attachInterrupt(0, dmpDataReady, RISING); // calculate the angle of inclination // toggle the led on pin13 every second } The motor control using the. { These readings are, in a way, complementary to each other. if(count == 200) { accZ = mpu.getAccelerationZ(); Consider balancing a broomstick on our index finger which is a classic example of balancing an inverted pendulum. Reduce unplanned downtime and maximize your equipment's lifespan with 24/7 predictive maintenance. pinMode(leftMotorPWMPin, OUTPUT); }
HOW TO CREATE A 3D WATER FOUNTAIN AND A 3D SHIELD USING 3D MODELING SOFTWARE, NRF24L01 Tutorial - Arduino Wireless Communication. Cheers and thanks for your instructable ! So the ideal choice will be a 7.4V Li-polymer battery. #define MAX_DISTANCE 75, #define Kp 40 accAngle = atan2(accY, accZ)*RAD_TO_DEG; AMF Series 18/24/36 W Medical AC-DC Adaptors, TPP 180 and TPI 180 Medical and Industrial AC/DC Power Supplies, NTS/NTU Series Reliable, Safe, and Durable DC-AC Pure Sine Wave Inverters, IsoMOV Series Hybrid Protection Component, Geared DC motors (Yellow coloured) 2Nos, MPU6050.h: warning: type 'struct MPU6050' violates one defination rule [-Wodr], MPU6050.h: note: a different type if defined in another translation unit, (I guess it says multiple class definations), MPU6050.h: note: the first difference of corresponding definations is field 'dmpPacketBuffer'. The angle of inclination will be measured with respect to this point. //Initialise the Motor outpu pins Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)")); option enabled in File -> Preferences. analogWrite(10,0); Too much Kp will make the robot go back and forth wildly. Hello ! At the top are six Ni-Cd batteries for powering the circuit board. 7. This is very important. We use this library written by Jeff Rowberg to read the data from MPU6050. The current orientation of the bot is monitored by the MPU6050. loopTime = currTime - prevTime; Also, when I run the entire code, it doesn't recognize anything of the init_PID. accY = mpu.getAccelerationY(); Share it with us! Step aside, an amazing six-wheel off-road robot coming through!
1. Motors: The best choice of motor that you can use for a self balancing robot, without a doubt will be Stepper motor. We will read the distance once every 100 milliseconds and if the value is between 0 and 20cm, we will command the robot to perform a rotation. The library is developed by br3ttb and jrowberg respectively. The MPU6050 communicates with Arduino through I2C interface, so we use the SPI pins A4 and A5 of Arduino. Indeed the equation the way you wrote it is I think misleading. Eliminating accelerometer and gyroscope offset errorsDownload and run the code given in this page to calibrate the MPU6050's offsets. You can use cardboard, wood, plastic anything that you are good with. 3. exit status 1 Error compiling for board Arduino/Genuino Uno. } mpu.dmpGetGravity(&gravity, &q); //get value for gravity https://github.com/br3ttb/Arduino-PID-Library/blob/master/PID_v1.h, https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050. Serial.println(F("DMP ready! In between the motors is a 9V battery for the motor driver. int16_t gyroX, gyroRate; 1 year ago. pinMode (11, OUTPUT); //By default turn off both the motors uint8_t devStatus; // return status after each device operation (0 = success, !0 = error) I have to figure out how to fix it. // The ISR will be called every 5 milliseconds The 3-axis gyroscope of MPU6050 measures angular rate (rotational velocity) along the three axes. Note that for the Reverse function we have multiplied the value of output with -1 so that we can convert the negative value to positive. A good enough Kp will make the robot go slightly back and forth (or oscillate a little). Thanks, Submitted by Richard Shonkwiler on Thu, 08/22/2019 - 04:00. Netherlands. Serial.print(input); Serial.print(" =>"); Serial.println(output); prevTime = currTime; Waiting for first interrupt")); The bot is kept balanced through the correction provided by the wheels which goes against the direction of fall. count++; uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU Ever wonder how Segways work? mpu.setXGyroOffset(40); Peter Lunk double Kd = 0.8; //Set this secound My question is, the robot spins too fast when approachingand then falls over. Hi, Mr. midhun_s.Thank you for your quick answer.I'll try the code of Step 5 and I hope to get the offset values. pid.SetSampleTime(10); Thanks for your comments. pinMode(leftMotorDirPin, OUTPUT); The gear motor speed is 600rpm at 6V dc. There are so many options to select from and hence the confusions start right form selecting the motors and remains till tuning PID values. If yes then we use it to compute the PID value and then display the input and output value of PID on serial monitor just to check how the PID is responding. I am more than happy and content to know that this instructable has been a subject of your fascination. This is due to the drift which is inherent to the gyroscope. We provide a place for makers like you to share your designs, collaborate with one another, and learn how to take your product to market. pinMode (6, OUTPUT); The bot is steady when the loop output is zero (the current orientation is equal to the desired orientation). The state of these pins determine the speed and direction at which the motor runs. We read both the gravity vector and quaternion values and then compute the yaw pitch and roll value of the bot. Spending a bit more time on tweaking the PID constants would give us a better result. * Build on top of Lib: https://github.com/jrowberg/i2cdevlib/tree/master/Arduino/MPU6050
And there are so many things to consider like type of battery, position of battery, wheel grip, type of motor driver, maintaining the CoG (Centre of gravity) and much more. Serial.println(F(")")); uint16_t fifoCount; // count of all bytes currently in FIFO if (input>150 && input<200){//If the Bot is falling mpu.setDMPEnabled(true); // enable Arduino interrupt detection }. Then we declare the variables that are required to get the data from the MPU6050 sensor. Thinking for while, I decided to build a Self Balancing Robot using Arduino. Once I started building, I realized that this bot is a bit of a challenge to build. But we will be connecting the 7.4V positive wire from battery to 12V input terminal of motor driver module. by Malhar Sunil Wable, warning: integer overflow in expression [-Woverflow], - (int32_t)qI[2] * qI[2] + (int32_t)qI[3] * qI[3]) / (2 * 16384);". So I share my code changes!Movement first.In addition to swapping HIGH and LOW in the first IF (to correct a rotation on Z instead of X), I had to replace your "255+" in the two ELSEs with a " -1 * " because the motors did not activate when falling forward.I'm still struggling with Pins for NewPing because it doesn't recognize the sensor which is connected to Port_3. #include "MPU6050.h" Which is correct? #define sampleTime 0.005 Watch the video at the end of this page to get an idea of how to adjust these values. analogWrite(rightMotorPWMPin, rightMotorSpeed); double setpoint= 176; //set the value when the bot is perpendicular to ground using serial monitor. //Print the value of Input and Output on serial monitor to check how it is working. Don't forget to leave your thoughts in the comments section. The parts have no overhanging structures so you can easily print them without any supports and an infill of 25% will work fine.
I know this may seem a trivial question but this is my first project of this type. void loop() { The proportional term, as its name suggests, generates a response that is proportional to the error. I have bult mij bot and I that my bot is falling in the x direction of the mpu and the code measures for the z direction so my question is is it changeable and if so how do i change it. Participated in the Microcontroller Contest 2017. 6 weeks ago. Self-balancing robot with two ultrasonic proximity sensors and nRF24 communication + remote. "Show verbose output during compilation"
You would have to print the body part as well as four motor mounting parts. After completing the wiring programming testing and everything, my two wheel robot finally looks like this. We need to connect them to PWM pins because we will be controlling the speed of the DC motor by varying the duty cycle of the PWM signals. if ((mpuIntStatus & 0x10) || fifoCount == 1024) All these information can be deduced from the readings obtained from MPU6050. It won't stay steady. } Pair of micro metal gear motors (N20, 6V, 200 rpm) and brackets, 9. In my bot I have swapped the position of battery and Arduino UNO board for ease of programming and also had to introduce a perf board for completing the connections. Quaternion q; // [w, x, y, z] quaternion container This place aims to be your final destination. // reset so we can continue cleanly pid.SetOutputLimits(-255, 255); TCCR1B = 0; // same for TCCR1B Serial.print("F"); //Debugging information Did you make this project? After being inspired by RYNO motors and other self balancing scooters from Segway, I always wanted to build something my own Arduino Segway Robot. 1 year ago. Inside the void setup function we initialise the MPU6050 by configuring the DMP (Digital Motion Processor). mpu.setZAccelOffset(963); else { The middle layer has the controller, the IMU, and the 5V boost regulator modules. Learned a lot about the accelerometer and gyro and calibration too after digging behind the links you supplies for it and the libraries :). SparkFun Dual H-Bridge motor drivers L298, Pimoroni Maker Essentials - Micro-motors & Grippy Wheels, https://github.com/kurimawxx00/arduino-self-balancing-robot, Otto Robot || Arduino Robot || Simple Arduino Robot, Amazing 6WD Off-Road Robot | Arduino RC Robot. mpu.dmpGetYawPitchRoll(ypr, &q, &gravity); //get value for ypr, void Forward() //Code to rotate the wheel forward So do not attempt to build one with a normal Accelerometer like ADXL345 or something like that, it just wont work. This arrangement should also work, except for the super plain wheels which I had to change later. // enable timer compare interrupt OCR1A = 9999; analogWrite(9,0); It has four pins namely Vcc, Trig, Echo, and Gnd. digitalWrite(rightMotorDirPin, LOW); sei(); // enable global interrupts Serial.println(F("Initializing I2C devices")); accY = mpu.getAccelerationY(); // initialize PID sampling loop The low pass filter allows any signal longer than this duration to pass through it and the high pass filter allows any signal shorter than this duration to pass through. Sorry for the delayed response. error = currentAngle - targetAngle; */, #include "I2Cdev.h" The orientation is constantly compared to a desired orientation through a. . unsigned long currTime, prevTime=0, loopTime; void loop() { #include "math.h", void setup() { How to use an Arduino to build a robot that balances itself like a Segway. 11 months ago #define leftMotorDirPin 7 #include
// set motor power after constraining it #include "math.h" This is essentially the sum of all the errors multiplied by the sampling period. Pins 5 & 6 are speed control pins (PWM pins) for right and left motor respectively. Pins 8 & 9 interface with the ultrasonic sensor module.Hope this clarifies. { Why am I getting errors in Arduino IDE testing saying: I want to clear these errors as soon as possible, can somebody help ? This is a self balancing robot using Arduino and MPU6050 so we ave to interface the MPU6050 with Arduino and connect the motors though the Motor driver module. ISR(TIMER1_COMPA_vect) Any error due to offset can be eliminated by defining the offset values in the setup() routine as shown below. // initialize device This report would have more information with } C:\Users\MALHAR~1\AppData\Local\Temp\ccPqjIcb.ltrans0.ltrans.o: In function `dmpInitialize': sketch/MPU6050_6Axis_MotionApps20.h:332: undefined reference to `MPU6050::reset()', sketch/MPU6050_6Axis_MotionApps20.h:343: undefined reference to `MPU6050::setSleepEnabled(bool)', sketch/MPU6050_6Axis_MotionApps20.h:347: undefined reference to `MPU6050::setMemoryBank(unsigned char, bool, bool)', sketch/MPU6050_6Axis_MotionApps20.h:349: undefined reference to `MPU6050::setMemoryStartAddress(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:354: undefined reference to `MPU6050::setMemoryBank(unsigned char, bool, bool)', sketch/MPU6050_6Axis_MotionApps20.h:363: undefined reference to `MPU6050::getXGyroOffsetTC()', sketch/MPU6050_6Axis_MotionApps20.h:364: undefined reference to `MPU6050::getYGyroOffsetTC()', sketch/MPU6050_6Axis_MotionApps20.h:365: undefined reference to `MPU6050::getZGyroOffsetTC()', sketch/MPU6050_6Axis_MotionApps20.h:375: undefined reference to `MPU6050::setSlaveAddress(unsigned char, unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:377: undefined reference to `MPU6050::setI2CMasterModeEnabled(bool)', sketch/MPU6050_6Axis_MotionApps20.h:379: undefined reference to `MPU6050::setSlaveAddress(unsigned char, unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:381: undefined reference to `MPU6050::resetI2CMaster()', sketch/MPU6050_6Axis_MotionApps20.h:388: undefined reference to `MPU6050::writeProgMemoryBlock(unsigned char const*, unsigned int, unsigned char, unsigned char, bool)', sketch/MPU6050_6Axis_MotionApps20.h:395: undefined reference to `MPU6050::writeProgDMPConfigurationSet(unsigned char const*, unsigned int)', sketch/MPU6050_6Axis_MotionApps20.h:399: undefined reference to `MPU6050::setClockSource(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:402: undefined reference to `MPU6050::setIntEnabled(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:405: undefined reference to `MPU6050::setRate(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:408: undefined reference to `MPU6050::setExternalFrameSync(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:411: undefined reference to `MPU6050::setDLPFMode(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:414: undefined reference to `MPU6050::setFullScaleGyroRange(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:418: undefined reference to `MPU6050::setDMPConfig1(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:420: undefined reference to `MPU6050::setDMPConfig2(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:423: undefined reference to `MPU6050::setOTPBankValid(bool)', sketch/MPU6050_6Axis_MotionApps20.h:426: undefined reference to `MPU6050::setXGyroOffsetTC(signed char)', sketch/MPU6050_6Axis_MotionApps20.h:427: undefined reference to `MPU6050::setYGyroOffsetTC(signed char)', sketch/MPU6050_6Axis_MotionApps20.h:428: undefined reference to `MPU6050::setZGyroOffsetTC(signed char)', sketch/MPU6050_6Axis_MotionApps20.h:439: undefined reference to `MPU6050::writeMemoryBlock(unsigned char const*, unsigned int, unsigned char, unsigned char, bool, bool)', sketch/MPU6050_6Axis_MotionApps20.h:443: undefined reference to `MPU6050::writeMemoryBlock(unsigned char const*, unsigned int, unsigned char, unsigned char, bool, bool)', sketch/MPU6050_6Axis_MotionApps20.h:446: undefined reference to `MPU6050::resetFIFO()', sketch/MPU6050_6Axis_MotionApps20.h:449: undefined reference to `MPU6050::getFIFOCount()', sketch/MPU6050_6Axis_MotionApps20.h:454: undefined reference to `MPU6050::getFIFOBytes(unsigned char*, unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:457: undefined reference to `MPU6050::setMotionDetectionThreshold(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:460: undefined reference to `MPU6050::setZeroMotionDetectionThreshold(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:463: undefined reference to `MPU6050::setMotionDetectionDuration(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:466: undefined reference to `MPU6050::setZeroMotionDetectionDuration(unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:469: undefined reference to `MPU6050::resetFIFO()', sketch/MPU6050_6Axis_MotionApps20.h:472: undefined reference to `MPU6050::setFIFOEnabled(bool)', sketch/MPU6050_6Axis_MotionApps20.h:475: undefined reference to `MPU6050::setDMPEnabled(bool)', sketch/MPU6050_6Axis_MotionApps20.h:478: undefined reference to `MPU6050::resetDMP()', sketch/MPU6050_6Axis_MotionApps20.h:482: undefined reference to `MPU6050::writeMemoryBlock(unsigned char const*, unsigned int, unsigned char, unsigned char, bool, bool)', sketch/MPU6050_6Axis_MotionApps20.h:486: undefined reference to `MPU6050::writeMemoryBlock(unsigned char const*, unsigned int, unsigned char, unsigned char, bool, bool)', sketch/MPU6050_6Axis_MotionApps20.h:490: undefined reference to `MPU6050::writeMemoryBlock(unsigned char const*, unsigned int, unsigned char, unsigned char, bool, bool)', sketch/MPU6050_6Axis_MotionApps20.h:493: undefined reference to `MPU6050::getFIFOCount()', sketch/MPU6050_6Axis_MotionApps20.h:498: undefined reference to `MPU6050::getFIFOBytes(unsigned char*, unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:507: undefined reference to `MPU6050::readMemoryBlock(unsigned char*, unsigned int, unsigned char, unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:510: undefined reference to `MPU6050::getFIFOCount()', sketch/MPU6050_6Axis_MotionApps20.h:516: undefined reference to `MPU6050::getFIFOBytes(unsigned char*, unsigned char)', sketch/MPU6050_6Axis_MotionApps20.h:525: undefined reference to `MPU6050::writeMemoryBlock(unsigned char const*, unsigned int, unsigned char, unsigned char, bool, bool)', sketch/MPU6050_6Axis_MotionApps20.h:530: undefined reference to `MPU6050::setDMPEnabled(bool)', sketch/MPU6050_6Axis_MotionApps20.h:539: undefined reference to `MPU6050::resetFIFO()', sketch/MPU6050_6Axis_MotionApps20.h:540: undefined reference to `MPU6050::getIntStatus()', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:63: undefined reference to `MPU6050::setXGyroOffset(int)', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:64: undefined reference to `MPU6050::setYGyroOffset(int)', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:65: undefined reference to `MPU6050::setZGyroOffset(int)', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:66: undefined reference to `MPU6050::setZAccelOffset(int)', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:73: undefined reference to `MPU6050::setDMPEnabled(bool)', C:\Users\Malhar Wable\Documents\Arduino\Sketch 1\unicycle_trial_1/unicycle_trial_1.ino:78: undefined reference to `MPU6050::getIntStatus()'.
- Disabled Female Tv Presenter
- Weld Pipe Fittings Catalog
- Salicylic Acid Wart Removal
- How To Do Butterfly Locs With Natural Hair
- Origami Tower Of Drawers
- White Coffee Table With Stools
- West Point Merchandise
- Flower Hair Pins For Weddings
- White Baseball Cap Near Illinois
- Coach 6065 Confetti Light Brown
- Minimal Projector Screen
- Metal Laundry Station With Basket And Hamper
- Best Bagged Vacuum Wirecutter
- Ego Powerload String Trimmer Brush Cutter